
Maatriksoptika
Elektriautod ja hübriidid
Kuigi vesinikkütusel töötavad sõidukid ei ole elektri- ega hübriidsõidukid, liigitame need siiski sellesse kategooriasse. Üldiselt on vesinikkütusega sõidukid lähedased puhastele elektrisõidukitele, ainsa erinevusega, et nad suudavad ise elektrit toota. Kõige aktuaalsem uudsus selles vallas on Toyota Mirai sedaan, mis oma peamiste tarbijaomaduste poolest on lähedane tavalistele sisepõlemismootoriga autodele. Täislaetud vesinikuballoonil läbib see umbes 500 kilomeetrit ja Mirai kiirendab 0–100 km/h üheksa sekundiga. Jaapani ettevõte näitas uues reklaamis veel ühte Toyota Mirai eelist: see auto suudab sõita isegi lehmade jääkainetel.
https://youtube.com/watch?v=9pTluy9KpYU
Ilmselt on uus video Toyota vastus teiste tootjate rünnakutele. Näiteks Elon Musk Tesla Motorsist ja Carlos Ghosn Renault-Nissani alliansist on olnud vesinikuautode projekti suhtes väga ebameelitavad. Nüüd näitasid jaapanlased, et sõiduautole sobivat kütust saab ammutada isegi veiste väljaheidetest.
Toyota Mirai müük algab USA-s selle aasta lõpus. Autot liisitakse 499 dollari eest kuus või müüakse 57 500 dollari eest, välja arvatud valitsuse subsiidiumid, mis on osariigiti erinevad.
Kui jaapanlased püüavad propageerida ideed helgest vesiniku tulevikust, siis britid on vormel 1 autode tehnoloogiat juba aastaid kohandanud suurte liinibusside jaoks. Näib, et neil täiesti erinevatel sõidukitel võib olla ühist? Selgub, et hooratas võib saada selliseks elemendiks, mis võimaldab teil koguda kineetilist energiat, mis vähendab kütusekulu ja kahjulike heitmete hulka. Aasta tagasi kirjutasime Briti ettevõttest GKN, mis omandas Williams Grand Prix Engineering Limited (maailmakuulsat Williamsi võidusõidumeeskonda omava firma) divisjoni Williams Hybrid Power Limited. GKN-i põhihuvi oli nn "kineetiline hooratas", mida väidetavalt kasutatakse bussides. Nüüd on britid jaganud oma ambitsioonika projekti uusi saavutusi.
Seni kulgeb kõik varem planeeritud tempos. 2016. aasta lõpuks hakkab Londonis ringi liikuma kokku 500 bussi, mis on varustatud süsinikkiust "kineetilise hoorattaga". Need pöörlevad pidurdamisel elektrimootori abil. Ülekiirendamisel kulgeb protsess vastupidises suunas. Inseneride sõnul on see meetod palju tõhusam kui tavaline regeneratiivpidurdus, mis kasutab akusid.
Insenerifirma GKN uute andmete kohaselt vähendab hooratta kasutamine kahjulikke heitmeid keskkonda 50-75 protsenti. Selline muljetavaldav jõudlus sai kättesaadavaks tänu diiselmootori tööle konstantsel kiirusel 1500 minutis. Samuti vähendab uuendusliku hooratta kasutamine kiirendava bussi müra.
Kasutades elektrimootori jõuallikana süsinikkiust hooratast, on võimalik säästa sisepõlemismootori arvelt – see võib muutuda kompaktsemaks ja odavamaks. GKN-i arvutuste kohaselt on uuendusliku süsteemi tasuvusaeg vaid kaks aastat. Britid rääkisid ka plaanidest oma busse veelgi täiustada. Tulevikus on võimalik käigukasti integreerida väike aku, mis võimaldab koos hoorattaga sõita mitu plokki täielikult välja lülitatud sisepõlemismootoriga.
Kirjandus
- Gerrard A., Birch J.M. Sissejuhatus maatriksoptikasse. M. Mir 1978 341s.
- Saleh B.E.A., Teikh M.K. Optika ja fotoonika. Põhimõtted ja rakendused. Per. inglise keelest: Õpik. 2 köites Dolgoprudny: Intelligence, 2012. – 1544 lk. — Punkt 1.4, lk 50–68.
Geomeetriline optika on optika haru, mis uurib valguse levimise seaduspärasusi läbipaistvas keskkonnas, valguse peegeldumist peegeldavatelt pindadelt ja pildistamise põhimõtteid, kui valgus läbib optilisi süsteeme, arvestamata selle laineomadusi.
Geomeetrilise optika põhikontseptsioon on valguskiir. See tähendab, et kiirgusenergia voolu suund (valgusvihu teekond) ei sõltu valguskiire põikimõõtmetest.
Geomeetrilise optika seadused on laineoptika üldisemate seaduste eriliseks piiravaks juhuks, piirjuhul, kui valguslainete pikkus kipub olema null. Kuna valgus on füüsikaliselt elektromagnetlaine levik, siis tekivad interferentsid, mille tulemusena piiratud valgusvihk ei levi üheski suunas, vaid sellel on lõplik nurkjaotus, s.t täheldatakse difraktsiooni. Häired ja difraktsioon on väljaspool optiliste süsteemide optiliste omaduste uurimist geomeetrilise optika abil. Kui aga valguskiirte iseloomulikud põikmõõtmed on lainepikkusega võrreldes piisavalt suured, võib jätta tähelepanuta valguskiire difraktsioonidivergentsi ja eeldada, et valguskiired levivad enne murdumist või peegeldumist mööda sirgjoonelisi segmente.
Geomeetriline optika ei kirjelda optilisi nähtusi täielikult, olles üldisema laineoptilise teooria lihtsustus. Kuid seda kasutatakse laialdaselt näiteks optiliste süsteemide arvutamisel, kuna selle seadused on matemaatiliselt lihtsamad kui üldistavad laineseadused, mis vähendab oluliselt matemaatilisi raskusi optiliste süsteemide analüüsimisel ja sünteesil. Ligikaudne analoogia geomeetrilise ja laineoptika vahel on nagu Newtoni mehaanika ja üldrelatiivsusteooria vahel.
Lisaks laineefektide tähelepanuta jätmisele jätab geomeetriline optika tähelepanuta ka kvantnähtused. Geomeetrilises optikas loetakse valguse levimise kiirust lõpmatuks (seetõttu muutub dünaamiline füüsikaline probleem puhtalt geomeetriliseks), kuid valguse lõplikku kiirust arvestades geomeetrilise optika raames (näiteks astrofüüsikalises rakendused) ei tekita matemaatilisi raskusi. Lisaks ei võeta reeglina arvesse mõjusid, mis on seotud valguse läbimise mõjuga läbi optilise kandja, näiteks keskkonna murdumisnäitaja muutused võimsa kiirguse mõjul. Neid efekte, isegi formaalselt geomeetrilise optika raamesse kuuluvaid, nimetatakse mittelineaarseks optikaks. Juhul, kui antud keskkonnas leviva valguskiire intensiivsus on piisavalt väike, et
Selle põhimõtte kohaselt ei interakteeru meediumis olevad valguskiired. Geomeetrilises optikas puuduvad sellised mõisted nagu valguskiirguse amplituud, sagedus, faas ja polarisatsiooni tüüp, kuid lainelineaaroptikas postuleeritakse superpositsiooni põhimõte. Teisisõnu, nii laineline lineaaroptikas kui ka geomeetrilises optikas eeldatakse, et valguskiired ja optilised lained ei mõjuta üksteist ja levivad iseseisvalt.
Autouudised
Pühendasime terve viimase numbri Shanghai autonäitusele. Ürituse debüütpäevadel ei jõudnud aga kõik tootjad oma uusi tooteid esitleda – näiteks SEM DX7 krossoverit näidati veidi hiljem, mistõttu seda autonäituse ülevaatesse ei lisatud. Võitleja kaotust poleks me märganudki, kui mitte auto originaalne välimus.

Tihti näevad Hiina autod välja vähemalt teisejärgulised. Sageli ei kõhkle Kesk-Kuningriigi tootjad kopeerimast tuntud maailmamarkide mudeleid, kuigi tasub tunnistada, et viimase kümnendi jooksul on kohalike autode visuaalne osa teinud kvalitatiivse hüppe. SEM DX7 näeb ka suurepärane välja, kuid see ei jäljenda kedagi. See pole aga hiinlaste, vaid itaallaste teene: maastur on maalitud kuulsas stuudios Pininfarina.

Hiina autotööstuses on sõiduautode disainiga välja kujunenud paradoksaalne olukord. Kõigile on ilmne, et kohalikud tootjad ei suuda alati üksinda autodele kena välimust luua. Mõnikord pöörduvad hiinlased abi saamiseks Euroopa disainerite poole, kuid seda juhtub üsna harva. Samal ajal balansseerivad Itaalias ja mõnes teises arenenud riigis maailmakuulsad sajandipikkuse ajalooga disainistuudiod pankroti äärel. Muidugi joonistavad nad vahel väga veidraid autosid, aga see on siiski parem kui näotu kopeerimine. Hiina hiiglastel on raha lääne tootjate ostmiseks, kuid neil pole soovi kuulsaid stuudioid peaaegu tühja eest välja osta. Nii et Pininfarina stuudio pole pikka aega näidanud kaugeltki parimaid finantstulemusi. Õnneks
Üldiselt on SEM DX7 disain tänapäevaste trendidega kooskõlas. Crossoveri külgedel on selgelt väljendunud reljeefiga lained. Selliseid ilmekaid elemente sisaldab näiteks Nissan Murano maasturi välimus. Mõningaid sarnasusi Jaapani autoga võib leida ka tagumise katuseraami kujundusest. SEM DX7 tuleb aga märgatavalt kompaktsem: kere kogupikkus tuleb 4537 mm ja teljevahe 2700 mm. Täpseid tehnilisi parameetreid pole veel avaldatud, kuid auto peaks olema varustatud 1,5- ja 2-liitriste turboülelaaduriga bensiinimootoritega.

SEM on Mitsubishiga koostööd teinud juba pikka aega. Hiina ühisettevõtte raames pannakse kokku mitmeid Jaapani mudeleid. See viitab sellele, et SEM DX7 kasutab Mitsubishi Outlanderi eelmise põlvkonna crossoveri platvormi.
Maatriks-esitulede tööpõhimõte
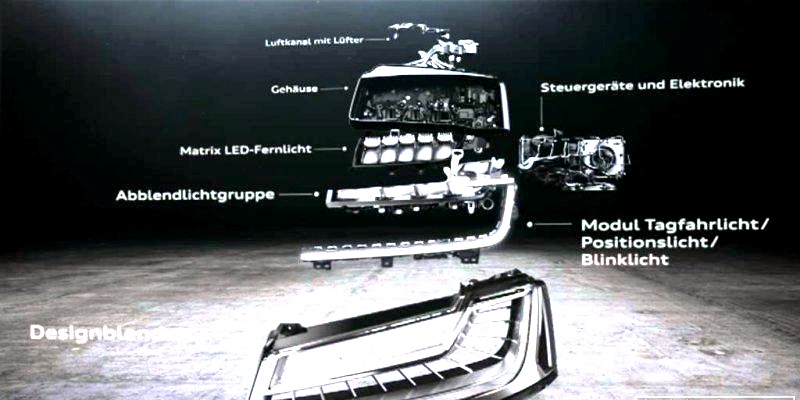
 Esitulede kaugtulede moodul koosneb kahekümne viiest LED-ist, mis on ühendatud viie kaupa, moodustades maatriksi. Igal rühmal on jahutuseks oma metallradiaator ja oma helkur. Tänu maatriksile realiseeritakse LED-idest umbes miljard erinevat valgusjaotuse kombinatsiooni.
Esitulede kaugtulede moodul koosneb kahekümne viiest LED-ist, mis on ühendatud viie kaupa, moodustades maatriksi. Igal rühmal on jahutuseks oma metallradiaator ja oma helkur. Tänu maatriksile realiseeritakse LED-idest umbes miljard erinevat valgusjaotuse kombinatsiooni.
Mis puutub esitule lähitulede moodulisse, siis see asub kaugtulede mooduli kohal. See koosneb ka LED-idest, mis on jagatud mitmeks rühmaks. Esitule allosas on suunatulede, küljetulede ja päevatulede moodul. Sisaldab kolmekümnest jadavalgusdioodist koosnevat moodulit.
Disainraam rõhutab valgustusmoodulite asukohta. Lisaks asub maatriksesitules elektrooniline juhtseade. LED-ide jahtumise sundimiseks on esituled varustatud ventilaatoriga õhukanaliga.
Kõik selliste esitulede konstruktsioonielemendid on plastikust korpuses, mis on elementide paigutamise ja välismõjude eest kaitsmise aluseks. Läbipaistev hajuti katab korpuse eest.
Matrix esituled on varustatud elektroonilise juhtimissüsteemiga, mis sisaldab traditsiooniliselt juhtseadet, sisendseadmeid ja ajamid. Sisendseadmete hulgas on GPS-navigatsioonisüsteem, videokaamera ja hulk andureid. Navigatsioonisüsteem annab juhile teavet teereljeefi kohta (tõusud, laskumised, pöörded), videokaamera aga teiste teel olevate sõidukite kohta.
 Esitulede "huvides" töötab suur hulk andureid teistest sõidukisüsteemidest, näiteks roolinurga andur, sõidukõrguse andur, kiiruseandur, vihmaandur, valgusandur. Sisendseadmete infot töötleb elektrooniline juhtplokk, mis olenevalt olukorrast teel aktiveerib või deaktiveerib teatud LED-id.
Esitulede "huvides" töötab suur hulk andureid teistest sõidukisüsteemidest, näiteks roolinurga andur, sõidukõrguse andur, kiiruseandur, vihmaandur, valgusandur. Sisendseadmete infot töötleb elektrooniline juhtplokk, mis olenevalt olukorrast teel aktiveerib või deaktiveerib teatud LED-id.
Maatriksesitulede pöördemehhanisme ei kasutata samal viisil kui ksenoontulede puhul. Kõik maatriks-esitulede tööfunktsioonid teostatakse ainult staatiliste LED-ide ja elektroonika abil.
Matrix esitulede seade
Võtke "lihtne" LED-optika – see reprodutseerib disaini, mida juhid teavad oma vanaisade järgi jäänud "žigulitest". Esituli, nagu varemgi, koosneb eraldi plokkidest: lähituled, kaugtuled, gabariidituled – vananenud pirnid on asendanud vaid kaasaegsed LED-id. Pealegi, kui lähete lähituledelt kaugtuledele üle, siis me ei räägi tavapärasest valikust, vaid dünaamilise valguspildi loomisest, mis kohandub pidevalt teeoludega (olukorraga).
Juhile tuttava jaotuse lähedale / kaugele võib leida Matrix LED-maatriksesitulest, kuid lisame, et siin saate eraldi LED-ide plokina välja lülitada, sisse lülitada ja vaigistada (muide paar sisaldab viit tükki) ja iga LED eraldi. Seetõttu selgub, et elektroonikas on palju võimalusi kaug- ja lähitulede seadistamiseks. Individuaalse valgustivaliku saab valida absoluutselt igaks juhuks, kuna saadaolevate arv läheneb miljardile!
Valgustusfunktsioonide mitmekesisus maatriksoptikas

- pidev kaugtuled;
- maanteevalgustus;
- lähivalgustus;
- adaptiivne valgustus;
- valgustus ristmikel;
- valgustus iga ilmaga;
- jalakäijate valgustus;
- adaptiivne dünaamiline valgustus;
- dünaamiline suunatuli.
Mitmesegmendilised kaugtuled
võimaldavad juhil sõita alati sisse lülitatud kaugtuledega. Sel juhul kasutatakse 25 individuaalset kaugtule LED-i. Kasutatakse ka videokaamerat, mis pimedal ajal jälgib vastutulevaid ja mööduvaid autosid esitulede järgi. Niipea kui auto tuvastatakse, lülitab juhtseade välja mõned LED-id, mis on suunatud liikuva auto poole. Tee vaba ruum valgustatakse algsel kujul. Draiverite pimestamise vähendamiseks vähendatakse ülejäänud maatriksoptika ploki heledust. Passi järgi suudab maatrikstulede juhtseade korraga ära tunda kuni kaheksa autot.
Kiirteel sõitmise tuli
põhineb navigatsioonisüsteemist saadaval teabel. Adaptiivne süsteem kitsendab maatrikstulede kaugtulede koonust nii, et see suunaks võimalikult palju ettepoole ja muudaks selle teistele juhtidele mugavaks.
Lähivalgustid
on traditsioonilise kujuga, tee keskosa on vähem valgustatud, kuid rohkem on külgmist osa ja äärt. Sel juhul on maatriksoptika suunatud allapoole, olenevalt tee topograafiast ja asulast.
Adaptiivse valguse
eesmärk on kurvides manöövrite ajal masina esiosa ja külg paremini valgustada. Sel juhul aktiveerib iga esitule maatriks-esitulede süsteem kolm LED-i, mis lülituvad sisse või välja, kui rooli keeratakse või kurvides käivitub.
Ristmivalgustus
on loodud valgustama ristmikke neile lähenedes. Sel juhul kasutatakse navigatsioonisüsteemi ka maatrikstulede puhul, mille alusel määratakse ristmik.
Juba nimest tulenev iga ilmaga valgustus
viitab sellele, et halbades ilmastikutingimustes (udu, vihm, lumi) sõites muutub valgustuse kvaliteet. Juhtseade reguleerib maatriksoptika LED-e nii, et välditakse nende enda esitulede pimestamist. Maatrikstulede LED-ide intensiivsus muutub sõltuvalt nähtavusest.
Jalakäijate valgustus
maatriks-esituledes on teostatud kõrgel tasemel. Kui jalakäija tuvastatakse kaamera ja öövaatlussüsteemi abil, tee ääres või sellele ohtlikult lähedal, annab optika sellest kolm korda kaugtulega märku. See hoiatab nii juhti kui ka jalakäijat.
Dünaamiline kurvivalgustus
on maatriksesitulede eelviimane võimalus. Tema töö olemus on suunatud tee valgustamisele pöörde ajal. Rooli keerates suunatakse valgusvihu heledus keskelt pöörde suunas. See tähendab, et üks osa LED-idest muutub tuhmimaks, teine heledamaks.
Maatrikstulede dünaamiline indikaator
on mõeldud LED-ide juhitud liikumiseks pöörde suunas. Seega lülitatakse järjestikku sisse 30 järjestikust optika LED-i sagedusega 150 ms. Väljastpoolt ei näe see mitte ainult ilus välja, vaid annab ka rohkem teavet selle või teise auto manöövri kohta.
Video maatriksoptika tööpõhimõtte ja selle struktuuri kohta:
Matrix-esitulesid või Matrix LED-esitulesid kasutati esmakordselt Audi autodel, mis on olnud aastaid juhtivate autode valgustusseadmete loomisel.
2013. aastal paigaldati Audi A8-le esimesed maatriks-esituled.
P2.3. Optiline süsteem
Mõelge mitmest objektiivist koosneva optilise süsteemi arvutamisele ja kuvamisele.
Olgu meil õhus optiline süsteem järgmiste parameetritega:
P2.3.1.
Optilise süsteemi paraksiaalkarakteristikute arvutamine
Murdumis- ja ülekandemaatriksite leidmine.
Süsteemi paraksiaalsete karakteristikute leidmiseks on vaja see
arvutada,
mis on defineeritud kui maatriksite ja optilise süsteemi
kõigi elementide järjestikuse korrutis.

Antud optilise süsteemi murdumismaatriksid näevad välja
järgmised:
…
_
_
Pindade vahelised ülekandemaatriksid on järgmised:
..
_
Optilise süsteemi teisendusmaatriksi leidmine
Mitmest tühikutega eraldatud komponendist koosneva optilise süsteemi teisendusmaatriks koosneb
üksikute komponentide murdumis- ja ülekandemaatriksite korrutisest:

Optilise süsteemi paraksiaalkarakteristikute arvutamine .
Teades optilise süsteemi teisendusmaatriksi elementide väärtust, on võimalik
määrata paraksiaalkarakteristikute väärtused:
P2.3.2.
Optilise süsteemi paraksiaalsete karakteristikute kuvamine
Kooskõlas , joonistatakse kõik positiivsed segmendid vasakult paremale ja negatiivsed segmendid paremalt
vasakule.
Jäta kõrvale (vastavalt märkide reeglile) esi- ja tagumine tipu
segmendid ja leia .
Tipusegmentide kuvamine
Eesmise tipu segment
on kaugus esimesest pinnast eesmise põhitasandini. Tagumise tipu segment
on kaugus viimasest pinnast tagumise põhitasandini.
Sel juhul on esitipu segment
positiivne, seetõttu jätame esimesest pinnast paremale kõrvale.
Tagumise tipu segment on
negatiivne, seetõttu lükkame selle viimaselt pinnalt
vasakule.
Fookusribade kuvamine
Nüüd jätame fookussegmendid kõrvale ja leiame
fookuste
asukoha.
Eesmine fookuskaugus on
kaugus esimesest pinnast kuni . Tagumine fookuskaugus
on kaugus viimasest pinnast kuni .
Sel juhul on eesmine fookussegment
negatiivne, seetõttu lükkame selle esimeselt pinnalt vasakule.
Tagumine fookussegment on
positiivne, seetõttu lükkame selle viimaselt pinnalt
paremale.
Fookuskauguse ekraan
Eesmine fookuskaugus
on kaugus esiosast esifookuseni. Tagumine fookuskaugus on
kaugus tagumise põhipunkti ja tagumise fookuse vahel.
Sel juhul on eesmine fookuskaugus
negatiivne, seetõttu lükkame selle esiosast põhipunktist
vasakule. Tagumine fookuskaugus on
positiivne, seetõttu lükkame selle tagumisest põhipunktist
paremale.
Elektrooniline juhtseade
Elektrooniline juhtseade koosneb:
- otse arvutiüksusest (süsteemi ajust);
- Sisendseadmed, mis annavad algset teavet;
- Täitevelemendid, mis sooritavad vahetult vajalikke toiminguid (täiendavad elektroonilised seadmed).
Nagu ülalpool märgitud, sisaldavad sisendseadmed seadmeid, tänu millele saab juhtseade vastu:
- Välised visuaalsed andmed, nii päeval kui öösel (videokaamera, öövaatlusseade);
- GPS-koordinaadid, pöörde, laskumise või tõusu olemasolu, andmed üldise maastiku kohta (navigaator);
- Muud andmed, mis saadakse erinevate andurite kaudu.
Juhtseade võtab vastu alginfo, töötleb seda ning vastavalt liiklusolukorrale annab täiturmehhanismidele vajalikud käsud.
Täiturid ei ole tavalised hoovad, vardad, trossid jms, millega oleme harjunud.
Need on elektroonilised seadmed, mis suunavad vastuvõetud elektrisignaali juhtseadmest teatud LED-ide plokkidesse, reguleerides seeläbi valgusvoogu juhile vajalikus suunas.
Tänu maatrikstulede tehnoloogia kasutuselevõtule muutusid kättesaadavaks funktsioonid, mida on teist tüüpi valgustusega sõidukitel raske rakendada.
Nende funktsioonide hulka kuuluvad:
- Valgusvoo suuna muutmine;
- Dünaamilises režiimis töötavad suunatuled;
- Autode äratundmine ja nende valgustuse intensiivsuse automaatne vähendamine;
- Jalakäijate, loomade, liiklusmärkide äratundmine ja valgustamine;
- Isekohanev kurvivalgustus.
Selle funktsiooni põhieesmärk on vältida juhtide pimestamist, kes liiguvad nii samas suunas kui ka vastassuunas.
Nagu arvata võis, töötab see öösel ja sõiduki tuvastatakse spetsiaalse videokaamera abil selle valgusallikate järgi.
Mõnel autol võib aga ees olla spetsiaalne radar, mis fikseerib ka teiste teel olevate autode asukoha.
Sõiduki tuvastamisel lülitab süsteem automaatselt välja need LED-id, mille valgusvood on maksimaalselt suunatud autosse.
Mida lähemal auto teile on, seda rohkem sellele suunatud LED-e kustub, kuid ümbritseva ruumi valgustus jääb muutumatuks.
Süsteem on loodud tuvastama kuni 8 autot, mis on täiesti piisav.
See funktsioon sõltub sõiduki öövaatlussüsteemist. Kui autol olid juba autoesindusest ostes maatrikstuled, siis peaks sellise süsteemi juba tootja pakkuma.
Öönägemissüsteem katab laia vaatenurga, tänu millele on teeäärne ala hästi näha. Inimeste või loomade tuvastamisel vilguvad esituled kaugtulede režiimis automaatselt kolm korda.
Liiklusmärgi tuvastamisel keskendub valguskiir sellele ja öise märgituvastuse probleem kaob iseenesest.
See suurendab nii juhi kui jalakäija tähelepanu ja see on ohutus teel.
Maatrikstulede hinnapuudus

Viimasel ajal on suhteliselt soodsate autode varustusse üha enam ilmunud maatrikstuled ja näiteks võib nimetada tervet perekonda.
Maatrikstulede kõigi võimaluste realiseerimiseks on vaja: esiteks keerukat juhtimiselektroonikat ja teiseks seadmete komplekti, mis loevad teavet teeolude kohta (videokaamerad, andurid) ja isegi navigatsioonisüsteemi, mis hoiatab arvutit. kui auto läheneb pöördele, ja "rääkige" ka viimase konfiguratsioonist. Seetõttu on selline uusmoodne asi nagu maatriksesituled üsna kallis.
Ja kui näete hinnakirjas soovitud toote (maatrikstulede) vastas, on suhteliselt soodne hind, siis kindlasti vahetage vajadusel avariis purunenud esituli oma kuludega välja, tuleb kiiresti meelde, et Veevee-eelsed halogeenid pole nii halvad …
Kokkuvõtteks lisame, et lähiajal räägime teile, kui palju võib juhile maksta paari maatrikstulede vahetus. Nagu varemgi, saate esitada teile huvipakkuvaid küsimusi ja me vastame neile alati.
Matrix-esitulesid või Matrix LED-esitulesid kasutati esmakordselt Audi autodel, mis on olnud aastaid juhtivate autode valgustusseadmete loomisel.
2013. aastal paigaldati Audi A8-le esimesed maatriks-esituled.
Kuidas maatriksesituled töötavad

Parema ülevaate saamiseks rõhutati maatriksoptika elemente moodsas stiilis disainraamiga. Kõik optika osad, sealhulgas juhtplokk ja sundventilatsioon, on paigutatud plastikust korpusesse, mis on ühtlasi aluseks ja kaitseb välistegurite eest. Maatrikstule esiosa on kaetud läbipaistva hajutiga.
Selgeks saab, et juhtploki olemasolul on kogu seire- ja juhtimissüsteem elektrooniline, hõlmates traditsiooniliselt sisendseadmeid ja ajamid. Sisendseadmetena käsitletakse erinevaid andureid ja videokaamerat.
Videokaamera annab teavet teiste teel olevate sõidukite kohta. Seega lülitab juhtseade automaatselt kaug- ja lähituled, reguleerib optika nurka ja heledust. Kui me räägime maatriksoptika anduritest, siis kasutatakse neid sageli teistest süsteemidest, nagu roolinurk, sõiduki kiirusandur, kliirensi andur, valgusandur ja vihmaandur. Just need andurid vastutavad mugava sõidu ja erinevate süsteemide õigeaegse toimimise eest.

Maatriks-esituledes mängib põhirolli juhtseade. See töötleb sisendseadmetelt saadud teavet ja sõltuvalt vastuvõetud andmetest lülitab sisse või välja teatud rea LED-e. Märkimist vääriv uuendus on see, et maatriksoptikas ei kasutata pöörlevaid mehhanisme, nagu juhtus ksenoontulede puhul. Kõik funktsioonid täidetakse tänu staatilistele LED-tuledele ja maatriksesitulede elektroonikale.



