
Sõiduki tarkvara
Artikkel sellest, mis on kaasaegse auto tarkvara. Tarkvara funktsioonid, protsessid ja tehnoloogiad. Artikli lõpus – huvitav video 5 vajalikust eluhäkkist teie autole!

Vaadake sisu üle:
- Autode tarkvara funktsioonid
- ECU põhikomponendid
- Protsessid ja tehnoloogia
- Mootori juhtimine
- Standardimine
- Video – 5 vajalikku eluhäkki autole
Ükski tänapäevane auto pole mõeldav ilma elektroonilise täitmiseta, mis hõlmab keerulist tarkvara. Autoga sõites ei mõtle me peaaegu kunagi, millised protsessid selle sees toimuvad – nagu arvutilgi, pole monitori, mis tähendab, et programmide tegevust ei visualiseerita, nagu neid polekski. Aga nad on.
Autode tarkvara funktsioonid

Kaasaegne tarkvara teie autole on väga töökindel: riistvara rikete määr on aasta jooksul vaid üks miljonist operatsioonist ja siis erandkorras.
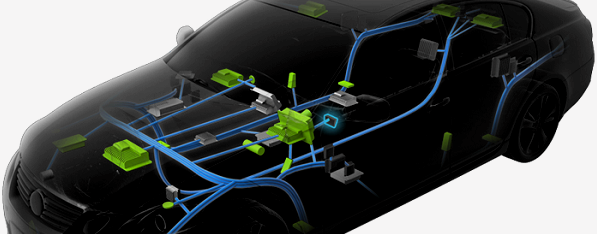
Nüüd on igas autos mitu elektroonilist juhtseadet (ECU) – elektrooniline juhtseade, ECU, mis suhtlevad üksteisega auto elektroonilise võrgu kaudu.
Nende plokkide vaheline interaktsioon toimub tänu siiniarhitektuuridele, mis on kontrollerite kombinatsioon – CAN, kontrolleri piirkondlik võrk, aga ka spetsiaalne võrk, mis on loodud teabe edastamiseks spetsiaalsetest digitaalseadmetest – MOST, meediale orienteeritud süsteemid trans, FIexRay , samuti kohalik ühendussüsteem (LIN).
Kui võrrelda loetletud siine arvutitele mõeldud Ethernetiga, töötavad need vähendatud kiirusega, kuna autodes töödeldavate andmete hulk on väike. Kuid see minimaalne teabehulk tuleks töödelda sõna otseses mõttes mõne millisekundi jooksul.
ECU-de arvu kasvades peavad disainerid looma keerukamaid sõidukisiseseid võrgustruktuure, mis nõuavad keerukamat arhitektuuri. Mõelge peamisele erinevusele autotarkvara ja muudel eesmärkidel kasutatavate digitaaltehnoloogiate vahel.
- Usaldusväärsus – auto süsteemiprogrammid üsna keerulises ECU-võrgus peavad töötama võimalikult usaldusväärselt kogu kasutusaja jooksul;
- Teostatud funktsioonide ohutus – ESC ja pidurisüsteem peavad töötama tõrgeteta ning see eeldab juba üsna tõsiseid nõudeid nii tarkvarale kui ka nende arendusprotsessile;
- Interaktsiooni kiirus – auto elektrooniliste komponentide hetkeline reaktsioon (kuni millisekundites) on võimatu ilma spetsiaalse tarkvaraarhitektuuri ja täiustatud operatsioonisüsteemideta;
- Tugev arhitektuur – sõiduki tarkvara peab rakendama maksimaalset elektromagnetilist ühilduvust, samuti ei tohi seda mõjutada moonutatud signaalid;
- Elektroonilis-mehaanilise tsükli sõlmede ühendamine.
Tähelepanu: Mitte mingil juhul ei tohi ECU-d töötamise ajal lähtestada!
ECU peamised komponendid
ECU on üsna keeruline plaat, millel on lisaks mikrokontrollerile sadu muid elemente. Vaatame peamisi üksikasju.
- Analoog-digitaalmuundur (ADC) – see seade on ette nähtud näitude võtmiseks teatud auto anduritelt, sealhulgas hapnikuanduritelt. Fakt on see, et protsessor suudab tajuda ainult digitaalseid väärtusi ja näiteks hapnikuindikaator toodab ainult elektrilisi signaale pingega 0 kuni 1,1 V. ADC teisendab need andmed 10-bitiseks kahendarvuks, mis on protsessorile arusaadav.
- Driver – programm, mis on loodud digitaalseadmete juhtimiseks signaalide teisendamise teel.
- Digital to Analog Converter (DAC) – pakub analoogsignaale auto mootori teatud komponentide käitamiseks.
- Sidekiip – need kiibid võimaldavad rakendada mitmesuguseid sõidukis saadaolevaid sidestandardeid. Selliseid standardeid on tootmises mitmeid, kuid levinuim neist on CAN – Controller-Area Networking. See tagab kiiruse 500 kbps, mis on hädavajalik moodulitele, mis sooritavad kuni sadu toiminguid sekundis.
Protsessid ja tehnoloogia

Pärast esimest autotarkvara on palju muutunud. Kui algselt sai tarkvara juhtida vaid üks tootja, siis nüüdseks on see muutunud peaaegu võimatuks.
Algselt, eelmisel sajandil, kasutati tarkvarana assemblerit. C-keel hakkas levima 90ndatel. Robert Bosch ja paljud teised müüjad on alustanud tarkvara arendamist, kasutades Mathlab/Simulinki ja ASCET-i (Control and Simulation Technology).
CAN-siinisüsteemid muudavad sõidukite tarkvara üsna keeruliseks. Põhjus on selles, et need ei välista erinevate ECU-de programmide vahelist koostoimet. Kaasaegsed luksusautod võivad sisaldada keerulist 80 eküüst koosnevat võrku, milles on kokku kuni 100 miljonit koodirida.
Kuna tarkvara muutub pidevalt keerukamaks, on vaja täiustada inseneritehnoloogiaid. Seetõttu tekivad tööstuses pidevalt paralleelsed tehnilised ja organisatsioonilised protsessid uue tarkvara teadvustamiseks.
Insenertehnilised lahendused protsesside ja arhitektuuri tasandil on samuti saamas üheks peamiseks allhanke tingimuseks. Selle asjaoluga seoses hakkas Bosch alates eelmise sajandi 90ndate algusest mõnda arengut kõrvale andma.
Praegu tegelevad autode tarkvaraga mitmed üle maailma levitatud ühendused. Ja selline tegevus on muutunud ettevõtluse jaoks üsna optimaalseks.
Mootori juhtimine

Rahvusvahelise keskkonnaalaste õigusaktide sätted nõuavad sõidukite kütusekulu vähendamist ja vastavat keskkonnasaaste vähendamist. See tähendab, et on olemas stiimul käigukasti täiustamiseks, et tagada optimaalne kütuse sissepritse ajastus ja süüte reaktsioon.
Näiteks on tänapäevased diiselmootorid võimelised kütust sissepritsima vähemalt seitse korda tsükli jooksul. Ja see neljasilindrilise mootori puhul, mis arendab pöörlemiskiirust kuni 1800 p/min, on 420 korda sekundis. Kõik see nõuab kõrvalekalde minimeerimiseks uusi tarkvarafunktsioone ja läbimõeldumaid juhtimisalgoritme.
Kahjulike heitkoguste vähendamise vajadus nõudis liikluse tagamiseks ajakohastatud tehnoloogiaid ja meetodeid. Seetõttu kuuluvad tulevikus lisaks tavalistele sisepõlemismootoritele lõviosa autoturust elektrimootoritele ja segaarendustele. Lisaks suureneb vajadus alternatiivsete kütuste järele ning tarkvara saab olema peamine hoob nende probleemide lahendamisel.
Mootori juhtimismoodul on sõiduki käigukasti juhtimiskeskus. Kaasaegsetel moodulitel on rohkem kui 2 megabaiti digitaalset mälu ja need töötavad kuni 160 MHz taktsagedustel. Samal ajal on kaasatud kuni 300 tuhande koodirea programmid.
Standardimine
Kaasaegsete autode digitaalsete programmide väljatöötamisel võetakse selgelt arvesse vajaliku ECU spetsiifikat: tarkvara suhtleb otseselt teatud seadmetega. Kuna autotööstuses kasutatavate ECU-de arv kasvab pidevalt, on tarkvara ringlussevõtt muutumas prioriteediks. Seetõttu on sellises olukorras kohane rääkida standardiseerimisest.
2003. aastal moodustasid tarnijad ja tootjad Automotive Open System Architecture (Autosar). Organisatsiooni loomise eesmärk on ühtse standardi ja ühtsete tehnoloogiate juurutamine. Tänaseks on sellesse ühendusse kuulunud üle 150 organisatsiooni, kes koos töötavad välja uue ECU struktuuri, põhitarkvara ja kõik vajaliku toimiva tarkvara loomiseks.
Selline interaktsioon hõlmab riistvarast sõltumatute sõlmede loomist. See võimaldab tarnijatel ja tootjatel jagada disainilahendusi ja taaskasutada neid paljudes ECU-des.
Autosari struktuur koosneb mitmest abstraktsest kihist, milles tarkvara on riistvarast eraldatud. Kõige tipus on rakendustarkvara, mis rakendab kõiki rakendustegevusi. Allpool on põhiline, nominaalne tarkvara. See garanteerib vajaliku abstraktsiooni riistvarast samamoodi nagu näiteks personaalarvutis. Autosar Runtime Environment (reaalajas täitmiskeskkond) suhtleb ECU sees.
Autosari tehnoloogia sisaldab kõiki vajalikke vahetusformaate ja -malle, mida kasutatakse nii infrastruktuuri genereerimiseks ja konfigureerimiseks kui ka selle kirjeldamiseks.
Bussid (kiire) Ethernet on tänapäeva autotööstuses kõige levinumad. Need toetavad usaldusväärselt ECU-de vahelist sidet, aga ka uusi võimalusi, sealhulgas ohutust puudutavaid.
Kvalitatiivselt analüüsitakse kõige mitmekesisemat teavet, et luua objektiivne keskkonnamudel, mis võimaldab moodustada uusi võimalusi, mis äärmuslikel juhtudel juhti toetavad.
Näiteks juhi tähelepanu hajutas kaasreisija. Sel juhul tuvastab rakendus eessõitva sõiduki pidurdamise, seejärel hoiatab juhti või rakendab automaatselt pidureid. Muide, juht ei pruugi isegi kohe sellise tarkvara olemasolust teada saada, kuni ta on ohtlikus kohas.
Järeldus
Tänapäeva autotööstuses on tekkimas eeldused järgmiseks teadus-tehnoloogiliseks revolutsiooniks tarkvaraarenduse vallas, sest laialdasemalt hakatakse kasutama digitehnoloogiaid ja olmeelektroonika võimalusi. Pole kaugel aeg, mil autod hakkavad kõigi statsionaarsete ja mobiilsete seadmete kaudu Interneti-ühendust looma. Ja samal ajal suureneb vaba tarkvara roll praktiliste probleemide lahendamisel.



